publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2024
- Humanoids
 NAS: N-step computation of All Solutions to the footstep planning problemJiayi Wang*, Saeid Samadi*, Hefan Wang*, and 4 more authorsIn 2024 IEEE-RAS International Conference on Humanoid Robots (Humanoids), Jul 2024
NAS: N-step computation of All Solutions to the footstep planning problemJiayi Wang*, Saeid Samadi*, Hefan Wang*, and 4 more authorsIn 2024 IEEE-RAS International Conference on Humanoid Robots (Humanoids), Jul 2024How many ways are there to climb a staircase in a given number of steps? Infinitely many, if we focus on the continuous aspect of the problem. A finite, possibly large number if we consider the discrete aspect, i.e. on which surface which effectors are going to step and in what order. We introduce NAS, an algorithm that considers both aspects simultaneously and computes all the possible solutions to such a contact planning problem, under standard assumptions. To our knowledge NAS is the first algorithm to produce a globally optimal policy, efficiently queried in real time for planning the next footsteps of a humanoid robot. Our empirical results (in simulation and on the Talos platform) demonstrate that, despite the theoretical exponential complexity, optimisations reduce the practical complexity of NAS to a manageable bilinear form, maintaining completeness guarantees and enabling efficient GPU parallelisation. NAS is demonstrated in a variety of scenarios for the Talos robot, both in simulation and on the hardware platform. Future work will focus on further reducing computation times and extending the algorithm’s applicability beyond gaited locomotion. Our video is available at https://youtu.be/I5yFe0ez0sI
@inproceedings{wang_nas_2024, title = {{NAS}: {N}-step computation of {All} {Solutions} to the footstep planning problem}, url = {http://arxiv.org/abs/2407.12962}, language = {en}, urldate = {2024-08-13}, doi = {10.1109/Humanoids58906.2024.10769878}, booktitle = {2024 {IEEE}-{RAS} {International} {Conference} on {Humanoid} {Robots} ({Humanoids})}, organization = {IEEE}, author = {Wang, Jiayi and Samadi, Saeid and Wang, Hefan and Fernbach, Pierre and Stasse, Olivier and Vijayakumar, Sethu and Tonneau, Steve}, month = jul, year = {2024}, bilibili = {https://www.bilibili.com/video/BV1eY4YeCEZ6} } - T-RO
 Online Multicontact Receding Horizon Planning via Value Function ApproximationJiayi Wang, Sanghyun Kim, Teguh Santoso Lembono, and 8 more authorsIEEE Transactions on Robotics, Jul 2024
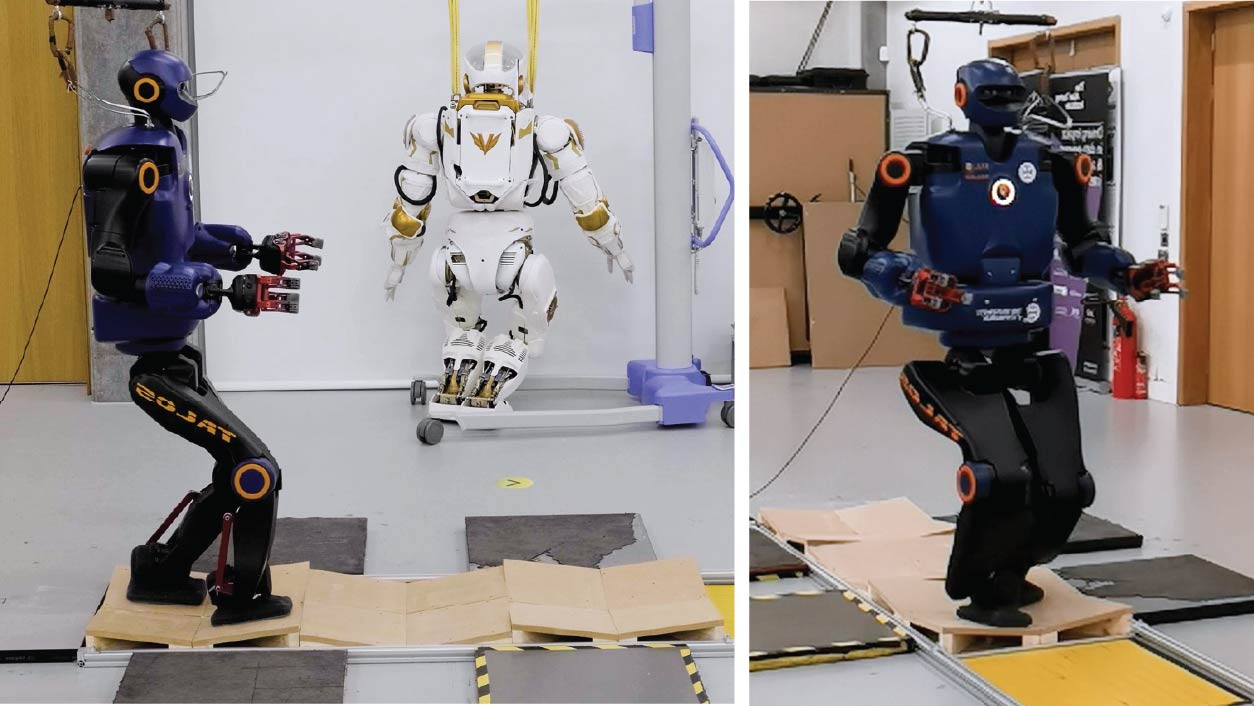
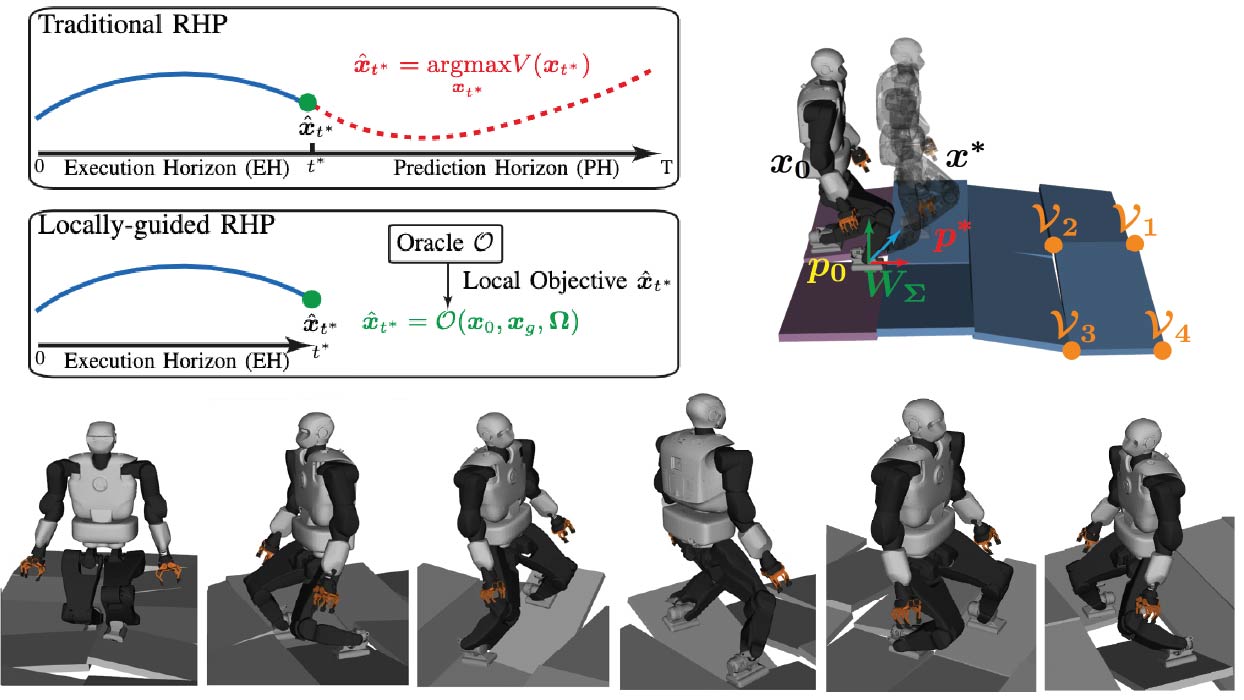
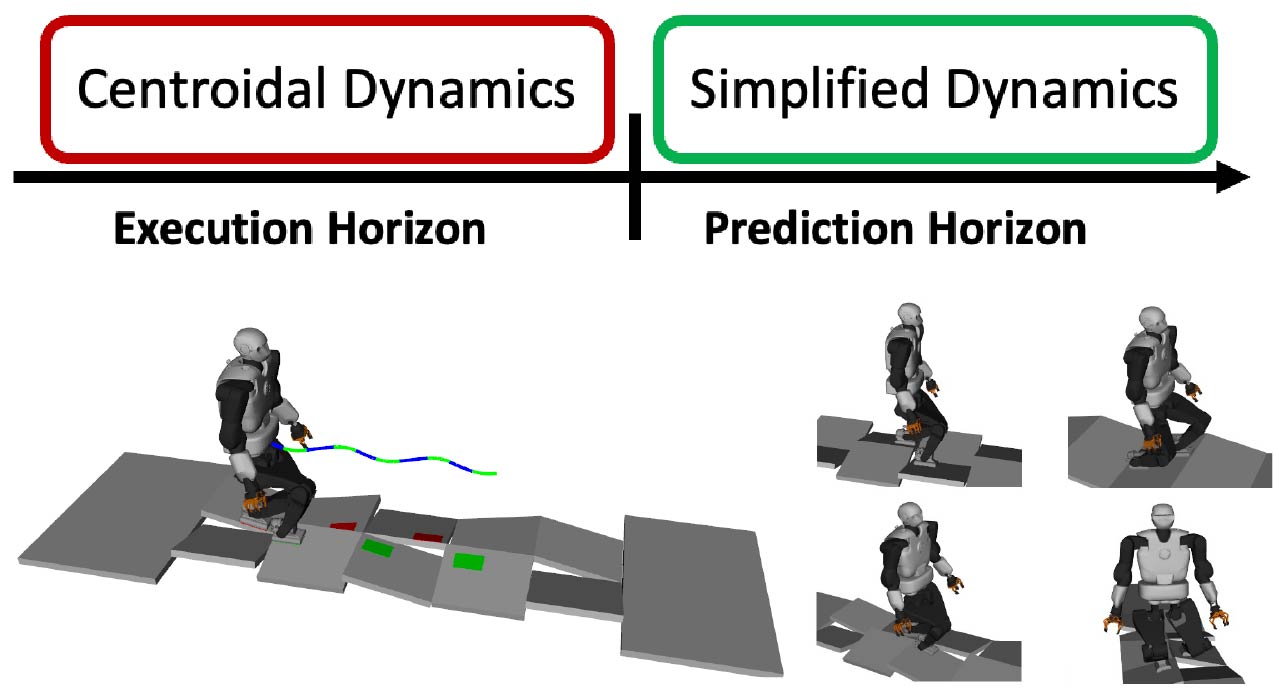
Online Multicontact Receding Horizon Planning via Value Function ApproximationJiayi Wang, Sanghyun Kim, Teguh Santoso Lembono, and 8 more authorsIEEE Transactions on Robotics, Jul 2024Planning multicontact motions in a receding horizon fashion requires a value function to guide the planning with respect to the future, e.g., building momentum to traverse large obstacles. Traditionally, the value function is approximated by computing trajectories in a prediction horizon (never executed) that foresees the future beyond the execution horizon. However, given the nonconvex dynamics of multicontact motions, this approach is computationally expensive. To enable online receding horizon planning (RHP) of multicontact motions, we find efficient approximations of the value function. Specifically, we propose a trajectory-based and a learning-based approach. In the former, namely RHP with multiple levels of model fidelity, we approximate the value function by computing the prediction horizon with a convex relaxed model. In the latter, namely locally guided RHP, we learn an oracle to predict local objectives for locomotion tasks, and we use these local objectives to construct local value functions for guiding a short-horizon RHP. We evaluate both approaches in simulation by planning centroidal trajectories of a humanoid robot walking on moderate slopes, and on large slopes where the robot cannot maintain static balance. Our results show that locally guided RHP achieves the best computation efficiency (95%–98.6% cycles converge online). This computation advantage enables us to demonstrate online RHP of our real-world humanoid robot Talos walking in dynamic environments that change on-the-fly.
@article{wang_online_2024, title = {Online {Multicontact} {Receding} {Horizon} {Planning} via {Value} {Function} {Approximation}}, volume = {40}, issn = {1941-0468}, url = {https://ieeexplore.ieee.org/document/10506550}, doi = {10.1109/TRO.2024.3392154}, urldate = {2024-09-04}, journal = {IEEE Transactions on Robotics}, author = {Wang, Jiayi and Kim, Sanghyun and Lembono, Teguh Santoso and Du, Wenqian and Shim, Jaehyun and Samadi, Saeid and Wang, Ke and Ivan, Vladimir and Calinon, Sylvain and Vijayakumar, Sethu and Tonneau, Steve}, year = {2024}, pages = {2791--2810}, bilibili = {https://www.bilibili.com/video/BV1du4y1Z7Sn} }


2023
- PhD Thesis
 Online receding horizon planning of multi-contact locomotionJiayi WangThe University of Edinburgh, Jul 2023
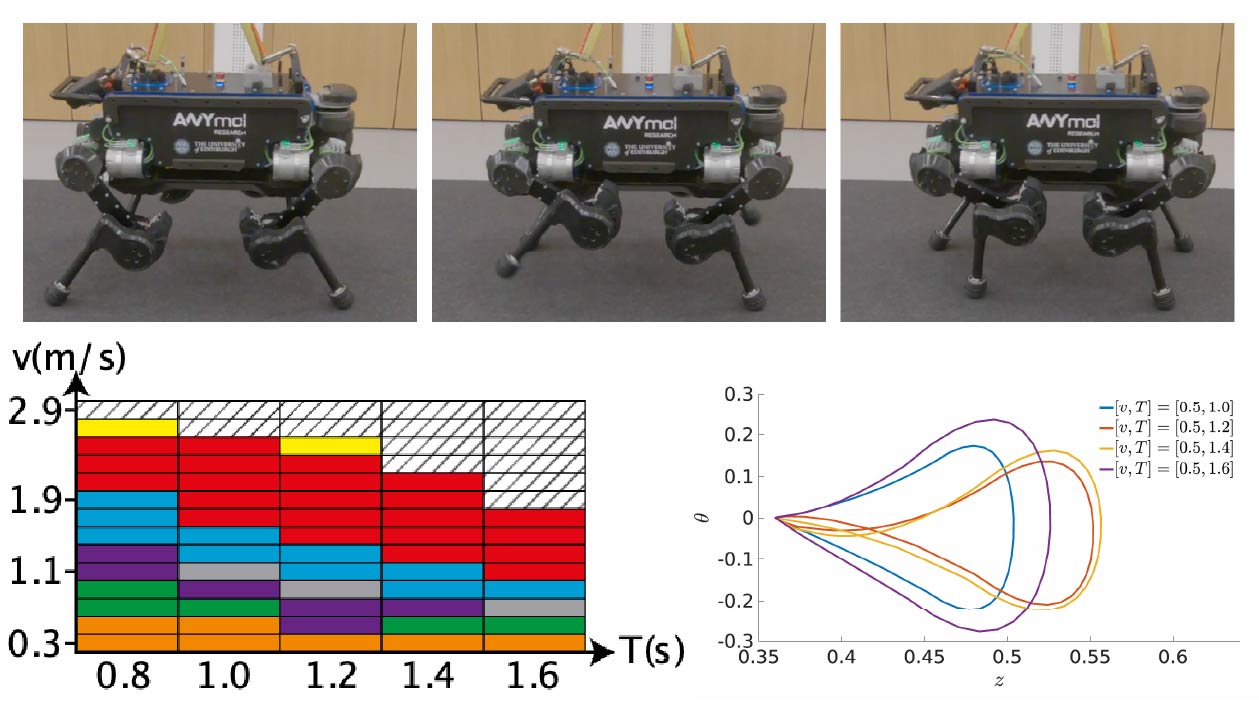
Online receding horizon planning of multi-contact locomotionJiayi WangThe University of Edinburgh, Jul 2023Legged robots can traverse uneven terrain by using multiple contacts between their limbs and the environment. Nevertheless, to enable reliable operation in the real world, legged robots necessarily require the capability to online re-plan their motions in response to changing conditions, such as environment changes, or state deviations due to external force perturbations. To approach this goal, Receding Horizon Planning (RHP) can be a promising solution. RHP refers to the planning framework that can constantly update the motion plan for immediate execution. To achieve successful RHP, we typically need to consider an extended planning horizon, which consists of an execution horizon that plans the motion to be executed, and a prediction horizon that foresees the future. Although the prediction horizon is never executed, it is important to the success of RHP. This is because the prediction horizon serves as a value function approximation that evaluates the feasibility and the future effort required for accomplishing the given task starting from a chosen robot state. Having such value information can guide the execution horizon toward the states that are beneficial for the future. Nevertheless, computing such multi-contact motions for a legged robot to traverse uneven terrain can be time-consuming, especially when considering a long planning horizon. The computation complexity typically comes from the simultaneous resolution of the following two sub-problems: 1) selecting a gait pattern that specifies the sequence in which the limbs break and make contact with the environment; 2) synthesizing the contact and motion plan that determines the robot state trajectory along with the contact plan, i.e., contact locations and contact timings. The issue of gait pattern selection introduces combinatorial complexity into the planning problem, while the computation of the contact and motion plan brings high-dimensionality and non-convexity due to the consideration of complex non-linear dynamics constraints. To facilitate online RHP of multi-contact motions, in this thesis, we focus on exploring novel methods to address these two sub-problems efficiently. To give more detail, we firstly consider the problem of planning contact and motion plans in an online receding horizon fashion. In this case, we pre-specifying the gait pattern as a priori. Although this helps us to avoid the combinatorial complexity, the resulting planning problem is still high-dimensional and non-convex, which can hinder online computation. To improve the computation speed, we propose to simplify the modeling of the value function approximation that is required for guiding the RHP. This leads to 1) Receding Horizon Planning with Multiple Levels of Model Fidelity, where we compute the prediction horizon with a convex relaxed model; 2) Locally- Guided Receding Horizon Planning—where we propose to learn an oracle to predict local objectives (intermediate goals) for completing a given task, and then we use these local objectives to construct local value functions to guide a short-horizon RHP. We evaluate our methods for planning centroidal trajectories of a humanoid robot walking on moderate slopes as well as large slopes where static stability cannot be maintained. The result of multi-fidelity RHP demonstrates that we can accelerate the computation speed by relaxing the model accuracy in the prediction horizon. However, the relaxation cannot be arbitrary. Furthermore, owing to the shortened planning horizon, we find that locally-guided RHP demonstrates the best computation efficiency (95%-98.6% cycles converge online). This computation advantage enables us to demonstrate online RHP for our real-world humanoid robot Talos walking in dynamic environments that change on-the-fly. To handle the combinatorial complexity that arises from the gait pattern selection issue, we propose the idea of constructing a map from the task specifications to the gait pattern selections for a given environment model and performance objective (cost). We show that for a 2D half-cheetah model and a quadruped robot, a direct mapping between a given task and an optimal gait pattern can be established. We use supervised learning to capture the structure of this map in the form of gait regions. Furthermore, we also find that the trajectories in each gait region are qualitatively similar. We utilize this property to construct a warm-starting trajectory for each gait region, i.e., the mean of the trajectories discovered in each region. We empirically show that these warm-starting trajectories can improve the computation speed of our trajectory optimization problem up to 60 times when compared with random initial guesses. Moreover, we also conduct experimental trials on the ANYmal robot to validate our method.
@article{wang_online_2023, title = {Online receding horizon planning of multi-contact locomotion}, url = {https://era.ed.ac.uk/handle/1842/40850}, urldate = {2024-09-04}, author = {Wang, Jiayi}, year = {2023}, journal = {The University of Edinburgh}, doi = {http://dx.doi.org/10.7488/era/3603}, }

2022
- IROS
 Learning to Guide Online Multi-Contact Receding Horizon PlanningJiayi Wang, Teguh Santoso Lembono, Sanghyun Kim, and 3 more authorsIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2022
Learning to Guide Online Multi-Contact Receding Horizon PlanningJiayi Wang, Teguh Santoso Lembono, Sanghyun Kim, and 3 more authorsIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2022In Receding Horizon Planning (RHP), it is critical that the motion being executed facilitates the completion of the task, e.g. building momentum to overcome large obstacles. This requires a value function to inform the desirability of robot states. However, given the complex dynamics, value functions are often approximated by expensive computation of trajectories in an extended planning horizon. In this work, to achieve online multi-contact Receding Horizon Planning (RHP), we propose to learn an oracle that can predict local objectives (intermediate goals) for a given task based on the current robot state and the environment. Then, we use these local objectives to construct local value functions to guide a short-horizon RHP. To obtain the oracle, we take a supervised learning approach, and we present an incremental training scheme that can improve the prediction accuracy by adding demonstrations on how to recover from failures. We compare our approach against the baseline (long-horizon RHP) for planning centroidal trajectories of humanoid walking on moderate slopes as well as large slopes where static stability cannot be achieved. We validate these trajectories by tracking them via a whole-body inverse dynamics controller in simulation. We show that our approach can achieve online RHP for 95%-98.6% cycles, outperforming the baseline (8%-51.2%).
@inproceedings{wang_learning_2022, title = {Learning to {Guide} {Online} {Multi}-{Contact} {Receding} {Horizon} {Planning}}, doi = {10.1109/IROS47612.2022.9981234}, booktitle = {2022 {IEEE}/{RSJ} {International} {Conference} on {Intelligent} {Robots} and {Systems} ({IROS})}, author = {Wang, Jiayi and Lembono, Teguh Santoso and Kim, Sanghyun and Calinon, Sylvain and Vijayakumar, Sethu and Tonneau, Steve}, month = oct, year = {2022}, pages = {12942--12949}, bilibili = {https://www.bilibili.com/video/BV1YG411h739} }

2021
- Humanoids
 Multi-Fidelity Receding Horizon Planning for Multi-Contact LocomotionJiayi Wang, Sanghyun Kim, Sethu Vijayakumar, and 1 more authorIn 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), Jul 2021
Multi-Fidelity Receding Horizon Planning for Multi-Contact LocomotionJiayi Wang, Sanghyun Kim, Sethu Vijayakumar, and 1 more authorIn 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), Jul 2021When traversing uneven terrain, humans consider their future steps for choosing the best location and timing of their current step. Likewise, when planning multi-contact motions for legged robots (e.g. humanoids), a ’prediction horizon’ has to be considered. However, planning several steps ahead increases the dimensionality and non-linearity of an already challenging problem, which makes online planning intractable. We propose to reduce the problem complexity by using convex relaxations in the prediction horizon. We realize this idea within a Receding Horizon Planning (RHP) framework to plan dynamically consistent centroidal trajectories of humanoid walking on uneven terrain. This results in a novel formulation that combines an accurate non-convex model with a relaxed convex model, which we call RHP with multiple levels of model fidelity. We evaluate three candidate multi-fidelity RHPs with convex relaxations of the centroidal dynamics in the prediction horizon. The best candidate is 1.4x-3.0x (average 2.4x) faster than the traditional RHP that employs a single dynamics model over the entire look-ahead horizon. We also validate the resultant centroidal trajectories by tracking them with a whole-body inverse dynamics controller in simulation. Lastly, we find that incorporating angular dynamics in the prediction horizon is important to the success of multi-fidelity RHP.
@inproceedings{wang_multi-fidelity_2021, title = {Multi-{Fidelity} {Receding} {Horizon} {Planning} for {Multi}-{Contact} {Locomotion}}, doi = {10.1109/HUMANOIDS47582.2021.9555778}, booktitle = {2020 {IEEE}-{RAS} 20th {International} {Conference} on {Humanoid} {Robots} ({Humanoids})}, author = {Wang, Jiayi and Kim, Sanghyun and Vijayakumar, Sethu and Tonneau, Steve}, month = jul, year = {2021}, pages = {53--60}, bilibili = {https://www.bilibili.com/video/BV1o44y127nM} }

2020
- IROS
 Automatic Gait Pattern Selection for Legged RobotsJiayi Wang, Iordanis Chatzinikolaidis, Carlos Mastalli, and 4 more authorsIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2020
Automatic Gait Pattern Selection for Legged RobotsJiayi Wang, Iordanis Chatzinikolaidis, Carlos Mastalli, and 4 more authorsIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2020An important issue when synthesizing legged locomotion plans is the combinatorial complexity that arises from gait pattern selection. Though it can be defined manually, the gait pattern plays an important role in the feasibility and optimality of a motion with respect to a task. Replacing human intuition with an automatic and efficient approach for gait pattern selection would allow for more autonomous robots, responsive to task and environment changes. To this end, we propose the idea of building a map from task to gait pattern selection for given environment and performance objective. Indeed, we show that for a 2D half-cheetah model and a quadruped robot, a direct mapping between a given task and an optimal gait pattern can be established. We use supervised learning to capture the structure of this map in a form of gait regions. Furthermore, we propose to construct a warm-starting trajectory for each gait region. We empirically show that these warm-starting trajectories improve the convergence speed of our trajectory optimization problem up to 60 times when compared with random initial guesses. Finally, we conduct experimental trials on the ANYmal robot to validate our method.
@inproceedings{wang_automatic_2020, title = {Automatic {Gait} {Pattern} {Selection} for {Legged} {Robots}}, doi = {10.1109/IROS45743.2020.9340789}, booktitle = {2020 {IEEE}/{RSJ} {International} {Conference} on {Intelligent} {Robots} and {Systems} ({IROS})}, author = {Wang, Jiayi and Chatzinikolaidis, Iordanis and Mastalli, Carlos and Wolfslag, Wouter and Xin, Guiyang and Tonneau, Steve and Vijayakumar, Sethu}, month = oct, year = {2020}, pages = {3990--3997}, bilibili = {https://www.bilibili.com/video/BV1Gk4y1y7c2} }
